
Publié par Prof. Jean DEMARTINI sous licence Creative Commons BY-SA.
Le développement de procédures synchrones sur Arduino n’est pas très facile. La bibliothèque de base ne permet pas de réaliser des horloges logicielles non-bloquantes pour déclencher des actions associées à différentes périodes d’échantillonnage. De telles horloges permettent une programmation « event-driven synchrone » non bloquante. Un autre article montrera comment réaliser une programmation « event-driven asynchrone » déterministe non bloquante.
Cahier des charges
Une horloge software est caractérisée par :
- une période (ici en millisecondes) déclenchant des « tics » (événements d’horloge) à intervalles réguliers,
- une phase (en millisecondes) avant le premier « tic »,
- une fonction de callback (action périodique) dont l’appel est déclenché à chaque « tic ».
Implémentation
/***
* Implementation of software clocks based on
* the system clock millis().
*
* That idea can be extended to faster software clocks based
* on the system clock micros().
***/
class Clock {
private:
unsigned int phase;
unsigned int period;
unsigned long counter;
void (*callback)(void);
public:
void setup(int, int, void(*)(void));
int tick(void);
};
void
Clock::setup(int p, int f, void (*cb)(void)) {
period = p;
phase = f;
counter = millis();
callback = cb;
}
int
Clock::tick() {
int s = (millis() - counter) > phase;
if (s) {
/***
* the clock event triggers.
* the callback function.
***/
phase = period;
counter = millis();
callback();
return 1;
}
return 0;
}
Exemple d’application
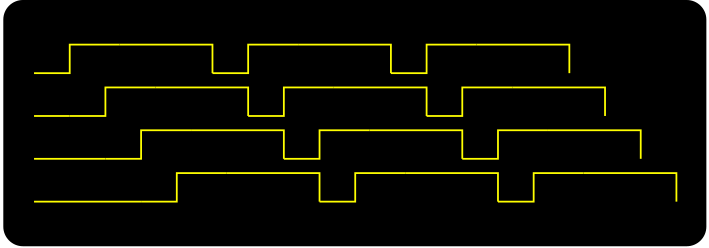
La commande d’un moteur pas à pas nécessite de créer des signaux de commande périodiques mais déphasés.
/***
* Producing the 4 phases for a step motor control.
***/
...
const int ledPin1 = 13;
const int ledPin2 = 7;
const int ledPin3 = 8;
const int ledPin4 = 9;
Clock c1, c2, c3, c4;
/***
* callback functions
*/
void blink1() { digitalWrite(ledPin1, !digitalRead(ledPin1)); }
void blink2() { digitalWrite(ledPin2, !digitalRead(ledPin2)); }
void blink3() { digitalWrite(ledPin3, !digitalRead(ledPin3)); }
void blink4() { digitalWrite(ledPin4, !digitalRead(ledPin4)); }
void setup() {
pinMode(ledPin1, OUTPUT);
pinMode(ledPin2, OUTPUT);
pinMode(ledPin3, OUTPUT);
pinMode(ledPin4, OUTPUT);
digitalWrite(ledPin1, LOW);
digitalWrite(ledPin2, LOW);
digitalWrite(ledPin3, LOW);
digitalWrite(ledPin4, LOW);
/***
* Building of the different clocks.
* The callback functions are activated.
*/
c1.setup(5, 1, &blink1);
c2.setup(5, 2, &blink2);
c3.setup(5, 3, &blink3);
c4.setup(5, 4, &blink4);
}
void loop() {
/***
* put here a call to the tick method of each clocks.
* When time of period elapse, the callback function
* is automatically called.
*
* Its a kind of clocked software interrupts.
*
* It is possible to use a master hardware clock to tick all the other ones.
*/
c1.tick();
c2.tick();
c3.tick();
c4.tick();
... /*** main part of the application ***/
}
En rassemblant toutes les parties
/***
* Implementation of software clocks based on
* the system clock millis().
*
* That idea can be extended to faster software clocks based
* on the system clock micros().
***/
const int ledPin1 = 13;
const int ledPin2 = 7;
const int ledPin3 = 8;
const int ledPin4 = 9;
class Clock {
private:
unsigned int phase;
unsigned int period;
unsigned long counter;
void (*callback)(void);
public:
void setup(int, int, void(*)(void));
int tick(void);
};
void
Clock::setup(int p, int f, void (*cb)(void)) {
period = p;
phase = f;
counter = millis();
callback = cb;
}
int
Clock::tick() {
int s = (millis() - counter) > phase;
if (s) {
/***
* the clock event triggers.
* the callback function.
***/
phase = period;
counter = millis();
callback();
return 1;
}
return 0;
}
Clock c1, c2, c3, c4;
/***
* callback functions
*/
void blink1() { digitalWrite(ledPin1, !digitalRead(ledPin1)); }
void blink2() { digitalWrite(ledPin2, !digitalRead(ledPin2)); }
void blink3() { digitalWrite(ledPin3, !digitalRead(ledPin3)); }
void blink4() { digitalWrite(ledPin4, !digitalRead(ledPin4)); }
void setup() {
pinMode(ledPin1, OUTPUT);
pinMode(ledPin2, OUTPUT);
pinMode(ledPin3, OUTPUT);
pinMode(ledPin4, OUTPUT);
digitalWrite(ledPin1, LOW);
digitalWrite(ledPin2, LOW);
digitalWrite(ledPin3, LOW);
digitalWrite(ledPin4, LOW);
/***
* Building of the different clocks.
* The callback functions are activated.
*/
c1.setup(5, 1, &blink1);
c2.setup(5, 2, &blink2);
c3.setup(5, 3, &blink3);
c4.setup(5, 4, &blink4);
}
void loop() {
/***
* put here a call to the tick method of each clocks.
* When time of period elapse, the callback function
* is automatically called.
*
* Its a kind of clocked software interrupts.
*
* It is possible to use a master clock to tick all the other ones.
*/
c1.tick();
c2.tick();
c3.tick();
c4.tick();
}