
Dans le cadre du Trophée Objets Connectés Services
Gestion de salles de réunion sur Raspberry Pi 3.
Cas d’usage: Pour la réservation d’une salle de réunion, une personne crée son profil, renseigne son adresse email, affiche les disponibilités de la salle désirée, effectue sa demande de réservation. Le jour venu, si la salle n’est pas occupée 5 minutes après la date de début, un email est envoyé pour demande à la personne si la réunion est maintenue.
La personne doit valider sa présence.
En l’absence de réponse ou l’absence de mouvement dans les 10 mn la réservation est annulée, la salle de réunion est de nouveau disponible.
En option, si mouvement dans la salle sans réunion programmée, l’occupation de salle est rajoutée dans le calendrier.
Membres de l’équipe:
- Edouard Kabia
- Maxime Mérimée
Capteur de mouvements soudé, testé, prêt à être utilisé!
GPIO:
- Pin 1: +3.3V (Orange)
- Pin 6: GND (Gris)
- Pin 11: GPIO 17 (Bleu)
Installation Kit Lora:
Port USB: COM6 à 57600 bauds
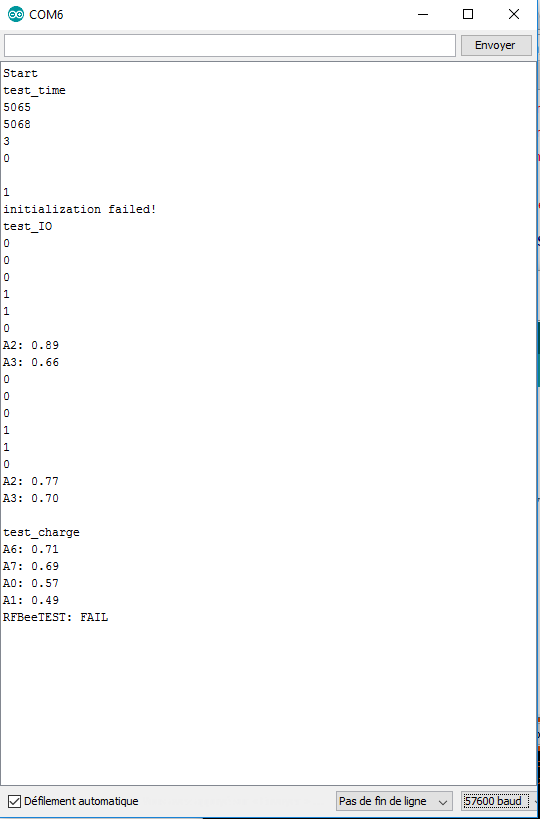
Pour le kit Lora, il s’agit d’une carte Seeeduino Stalker (http://www.seeedstudio.com/wiki/Seeeduino_Stalker_v2.3) avec un module ATIM ACW-XB (Lorabee XBee) et un GROVE Light sensor
Maintenant qu’on arrive à s’y connecter en 57600 bauds, il faut trouver les commandes à envoyer.
Dans Arduino, installer la bibliothèque DS3231
Configuration Serveur:
Windows Server 2012 R2 Active Directory domaine DEV
Sharepoint Server 2016