
L’INRAE
Développer une agriculture à la fois compétitive et respectueuse de l’environnement est l’ambition de l’Institut National de la Recherche Agronomique et l’environnement (INRAE), première institut de recherche agronomique en France et en Europe. Dans cet objectif, les thématiques de recherche de l’Institut Sophia Agrobiotech (ISA) dont je fais partie, visent à développer des connaissances dans le domaine des stratégies agronomiques innovantes (résistances des plantes, protection intégrée, lutte biologique) plus respectueuses de l’environnement et de la santé humaine.
L’emploi d’insectes entomophages, prédateurs et parasitoïdes, est une des voies de la lutte biologique. Leur étude donne lieu à des élevages en laboratoire. C’est sur une partie de ces élevages que travail l’équipe « Biologie des Populations Introduites » (BPI) don je fais partie.
La lutte biologique
Bien que les espèces dites envahissantes aient toutes un impact sur la biodiversité, ce sont surtout celles qui mettent en péril les activités humaines qui sont considérées comme les plus préoccupantes. Face aux pertes économiques provoquées, les produits phytosanitaires ont été employés à grande échelle. Cependant, ajouté à une perte d’efficacité au cours du temps sur les bio-agresseurs (apparition de souches résistantes), ils agissent sur toutes les espèces sans distinction, y compris sur les espèces dites utiles et sur la santé humaine (apparition de cancers). Aujourd’hui ces produits sont donc soumis à un ensemble de normes environnementales de plus en plus restrictives et un certain nombre d’entre eux sont retirés du marché.
Dans la recherche de solutions pour une réduction des intrants phytosanitaires, il importe de trouver des méthodes alternatives, dont la lutte biologique fait partie. La « lutte biologique » consiste à utiliser des organismes vivants contre les ravageurs des cultures sans avoir recours aux pesticides.
Les recherches visent à trouver des prédateurs, des parasites ou des pathogènes qui s’attaqueront spécifiquement à un ravageur ciblé. Bien que la lutte biologique n’éradique pas les ravageurs, elle permet de maintenir leur population à un seuil économiquement supportable et ne présente pas d’effets néfastes sur la santé humaine.
Les insectes auxiliaires des cultures
L’étude des insectes auxiliaires et des conditions favorisant leur présence et leur activité est un aspect incontournable de la lutte biologique.
Plusieurs d’entre eux sont prélever en pleine nature puis élevés et multiplier en laboratoire pour les besoins d’expériences et de données scientifique.
Lorsque ceux-ci présentent des caractéristiques suffisamment intéressantes pour être utilisés à grande échelle, on les élève en masse en vue de faire des lâchers expérimentaux, afin de voir si les observations faites en laboratoire, se confirment en milieu naturel.
Les trichogrammes
Parmi les nombreux insectes élever à l’INRAE, les trichogrammes occupe une place importante. Il s’agit de micro-guêpe parasitoïde de moins d’un millimètre, utiliser contre plusieurs espèces de papillons ravageurs des cultures.
(Un parasitoïde est un organisme qui se développe sur ou à l’intérieur d’un autre organisme dit « hôte », mais contrairement à un parasite, le parasitoïde tue inévitablement son hôte au cours ou à la fin de son développement).
Le trichogramme cherche les œufs d’une espèce hôte et pond dedans. Ses larves dévoreront l’œuf de l’intérieur avant qu’il n’éclose et il en émergera d’autres trichogrammes qui iront à leurs tours à la recherche d’œufs hôte.

Trichogramme femelle en train de pondre

Le mâle trichogramme se reconnaît à ses antennes poilues
L’élevage des trichogrammes
Comme il l’a été dit précédemment, les trichogrammes ont besoin des œufs d’un hôte pour leurs propres descendances. Pour cela, nous utilisons des œufs d’ephestia ; genre de lépidoptère (nom scientifique des papillons) dont fait partie la pyrale du maïs notamment.
Ces œufs nous sont fournis par une boite privée qui les élèves en masse pour les besoins des divers organismes de recherche. Ils sont si fin et si nombreux qu’ils ont l’aspect du sable fin. Ces œufs sont appliqués sur des languettes de post-it pour ensuite mit en contact avec les trichogrammes.
Du fait de leurs petites tailles, les trichogrammes sont élevés dans des tubes à hémolyse.

Dans ce tube, on peut voir les trichogrammes se balader autour de la plaquette nouvellement introduite. La languette d’œuf est ensuite retiré au bout d’une durée de 24h ; temps estimer suffisent pour que le majeur partie des œufs soient parasité. Pour cela, il nous suffit de taper le tubes pour faire tomber les trichogramme de sortir la languette et éventuellement de la nettoyer à l’aide d’un pinceaux pour en chasser les trichogrammes qui seraient rester accroché.
Il faut aussi remettre une nouvelle plaquette « d’œufs frais » dans le tubes et le refermer immédiatement avec que les trichogrammes ne s’échappe.

La plaquette ainsi retiré est isolée dans un nouveau tube. Au bout d’environ deux semaines, les œufs parasités noircissent, signent que de nous trichogrammes en émergeront bientôt. Lorsque cela arrive, on réitère l’étape précédente.
La petite touche de miel
Les tubes dans lesquels sont isolé les languettes d’œufs parasité on au préalable reçu une fine trainée de miel contre leurs parois. Cela permet aux trichogrammes d’avoir de quoi se nourrir et ainsi de maximisé leurs durées de vie.
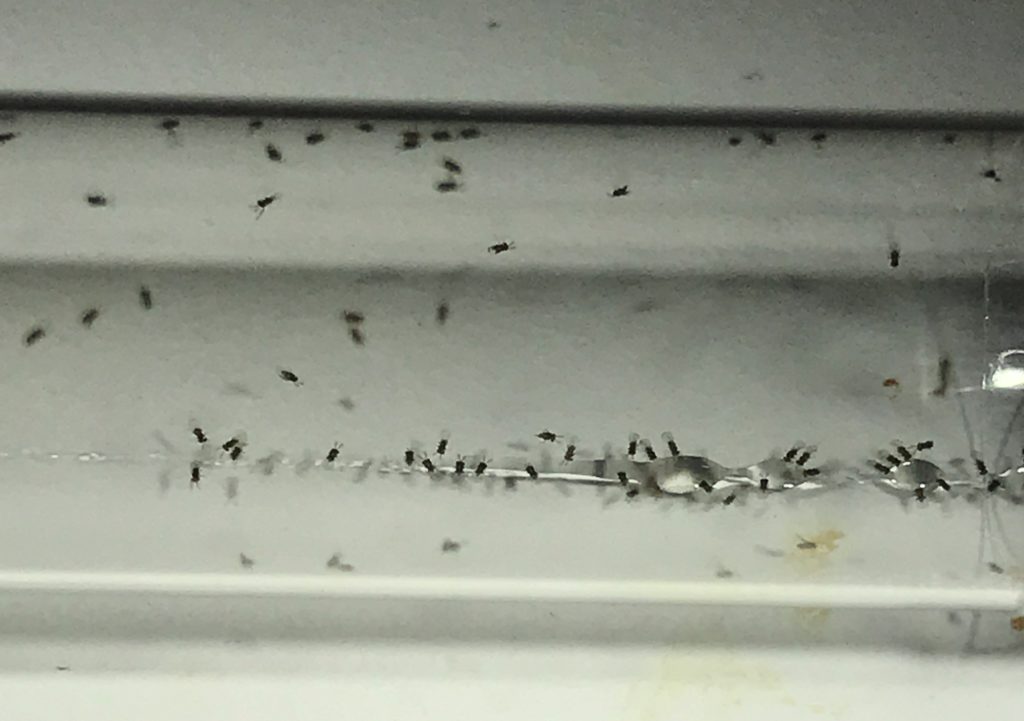
Vue détaillée de la trainée de miel autour de laquelle les trichogrammes viennent s’agglutiner.
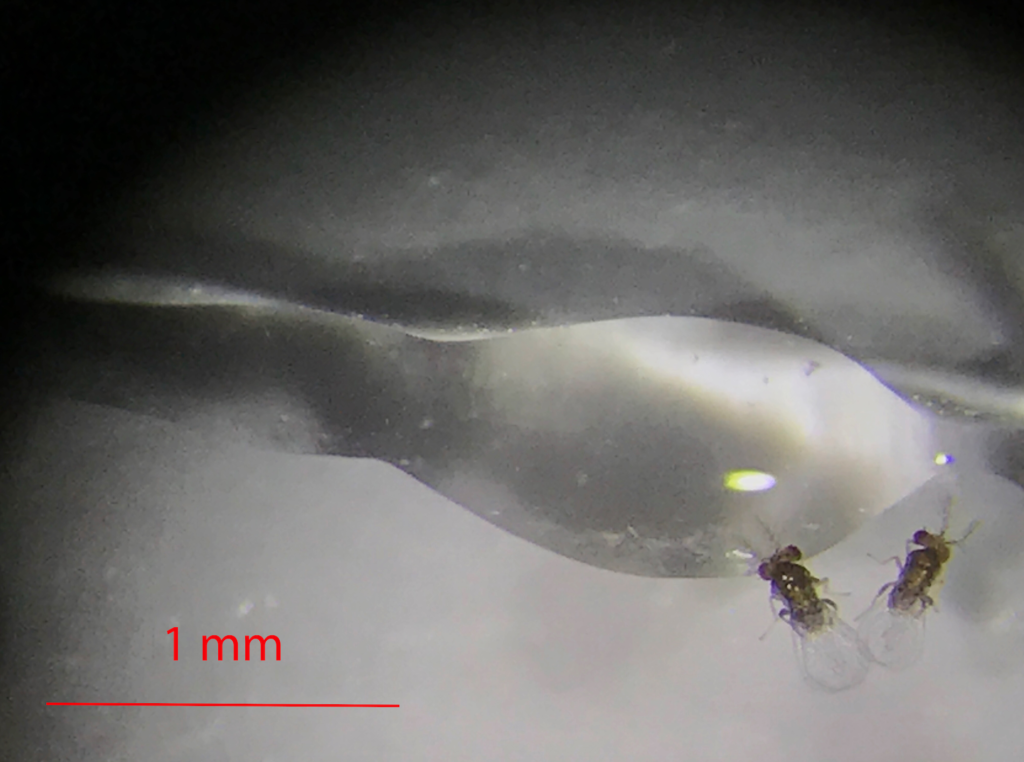
Deux trichogrammes à côtés d’une goutte de miel


Le miel est appliqué soit à l’aide d’une seringue remplie de miel, soit à l’aide d’un petit stylet à l’extrémité duquel une petite aiguille a été collée. Dans ce dernier cas, le stylet est délicatement trempé dans du miel avant chaque application.
Mon projet
La préparation de tubes miellé est une tâche longue mais nécessaire. Comme elle est répétitive, je me suis souvent dis qu’elle serait parfaitement remplie par un robot. Cependant, il n’existe rien dans le commerce permettant de réaliser un travail aussi spécifique et je ne me voyais pas non plus le construire moi-même. A cette époque, je n’avais aucune connaissance en robotique ou même en programmation.
C’est lorsque j’ai entendu parler du fablab et que Xavier LEBRETON m’a parler du concours TOCS que le premier déblocage se fit : Je pourrais accéder aux outils et à l’aide nécessaire pour permettre à une simple idée de devenir concrète.
Mes premières idées furent de construire un robot Delta ou un triperon. Cependant, devoir construire ce type d’engin en partant de zéro était une tâche inaccessible au vu du temps imparti et de mes connaissances quasi inexistantes sur le sujet.
J’ai participé à plusieurs formations dispensées par le fablab : la programmation d’un M5 stick, la modélisation 3D avec le logiciel Fusion360 ainsi que les techniques d’impression 3D. J’ai ensuite affiné mes connaissances en regardant des heures de vidéo tutoriel sur YouTube et en pratiquant.
Xavier m’a prêté une imprimante 3D sur laquelle je pourrais directement programmer du Gcode ; m’épargnant ainsi l’étape de construction du robot. Il me présenta aussi à Jean-François qui m’apporta de la programmation sur python et raspberry pi.
J’avais déjà une idée assez précise de ce que je voulais construire : un pousse-seringue monter sur l’imprimante 3D.
La première étape que je fis fut de concevoir un support pour les tubes. Je me servis au départ du logiciel inkscape pour concevoir le plan de chaque pièce mais je finis par l’abandonner au profit de Fusion360 ; moins intuitif mais infiniment plus précis. Puis chacune des pièces fut découper au laser dans une plaque de plexiglass qu’un collègue eu la bonté de me donner pour mon projet. Je réussi à faire mon support au second essai. Ce premier prototype de portoir peut accueillir jusqu’à 16 tubes. L’objectif finale serait d’en avoir un pour 50 tubes, avec des trous assez grands pour tous les tubes.
En effet, j’eu la mauvaise surprise de découvrir qu’aucun de mes tubes n’avaient le même diamètre. En effet, ces tubes en verre soufflé et on un diamètre compris entre 12,20 et 12,40 mm. Sachant que j’ai fait les trous de mon support avec un diamètre de 12,30 mm, certains tubes ne rentraient pas.
Puis vint l’étape de la programmation de l’imprimante. Xavier m’initia aux commandes du Gcode et quelques tutoriels sur internet achevèrent de me fournir le savoir nécessaire pour commencer. Mes premiers essais en Gcode furent un peu hasardeux mais je compris vite à m’en servir.
Satisfait de ma maitrise en matière de programmation, je passais à l’étape suivante… j’étais loin de me douter du calvaire que ce fut.
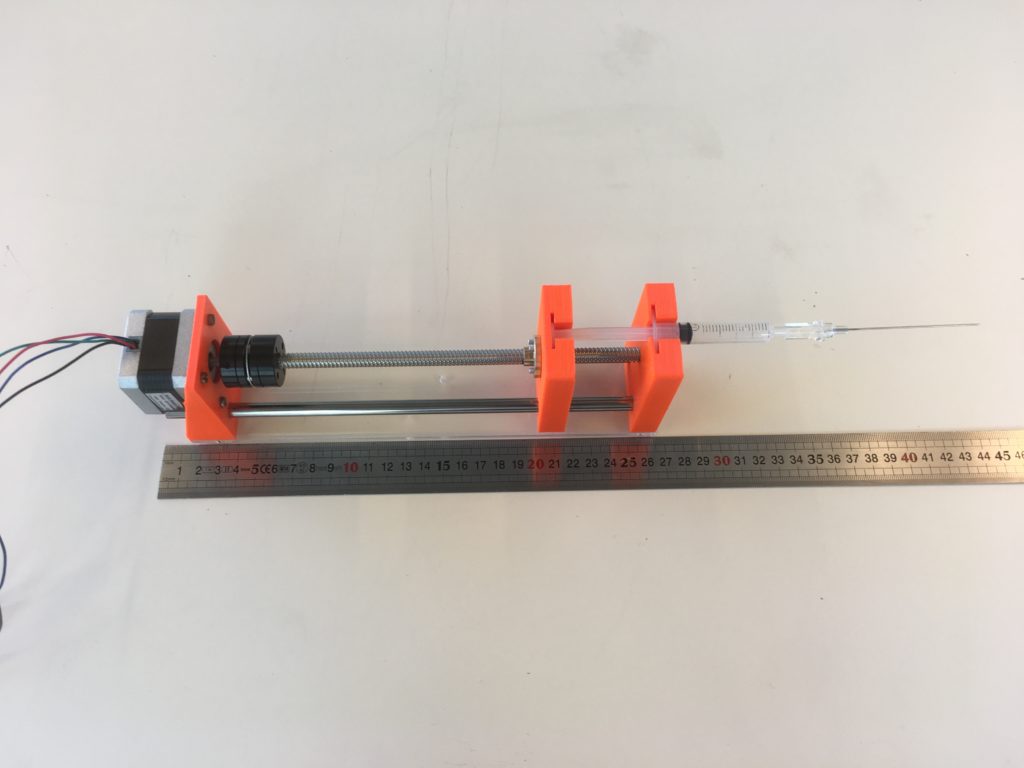
Je m’attelais donc un plan visant à fabriquer le pousse-seringue. Bien que je pus facilement trouver des plans déjà tout fait et près à être imprimer sur internet, tous avaient une petite contrainte pour mon projet (trop gros ou petit, moteur différent de ceux fournis par le fablab, base incompatible pour être fixer sur l’imprimante, type de seringue trop distinct de celle que je prévoyais d’utiliser, etc…). Je choisie plutôt de mettre à contribution mes connaissances durement accumulé en Fusion360 pour modéliser mon propre pousse seringue.
Après quelques heures, je parvins à sculpter mes pièces et je les fis imprimer sans soucis. La base du pousse-seringue serais quant à elle fait dans un morceau de plexiglass. Sans être forcément plus léger, cela couterait mon chère en plastique d’imprimante et le rendrait aussi plus facilement démontable et modifiable en cas d’erreur de construction (et la suite me donnera raison).
Il me suffit ensuite de viser le moteur et la base sur mes pièces imprimer.
Le premier problème rencontrer sur le pouce-seringue fut les deux guides d’acier qui le traversais. Les trous prévus à leurs passages était un peu trop petit et je dû les agrandir à l’aide de la perceuse à colonne pour faciliter le passage de la pièce qui appuie sur la seringue.
Puis ce fut la tige fileter qui était trop grande, plutôt que de la couper, je préférais percer au travers de la pièce qui soutient la seringue pour permettre son passage.
Ensuite il me fallut fixer la base à la place de l’extrudeur… premier problème : certaine tête de vis m’en empêchais. Paul m’aider à redessiner une nouvelle base avec des trou pour laisser passer les têtes de vis, que je pus découper au laser.
Une fois installer, il fallut faire plusieurs manipulations pour déplacer l’interrupteur fin de course de l’axe Z de l’imprimante. Là encore, beaucoup de tests et de tentatives jusqu’à obtenir quelque chose de viable.
Ce fut long, mais j’ai finalement réussi à concevoir mon propre pousse-seringue.
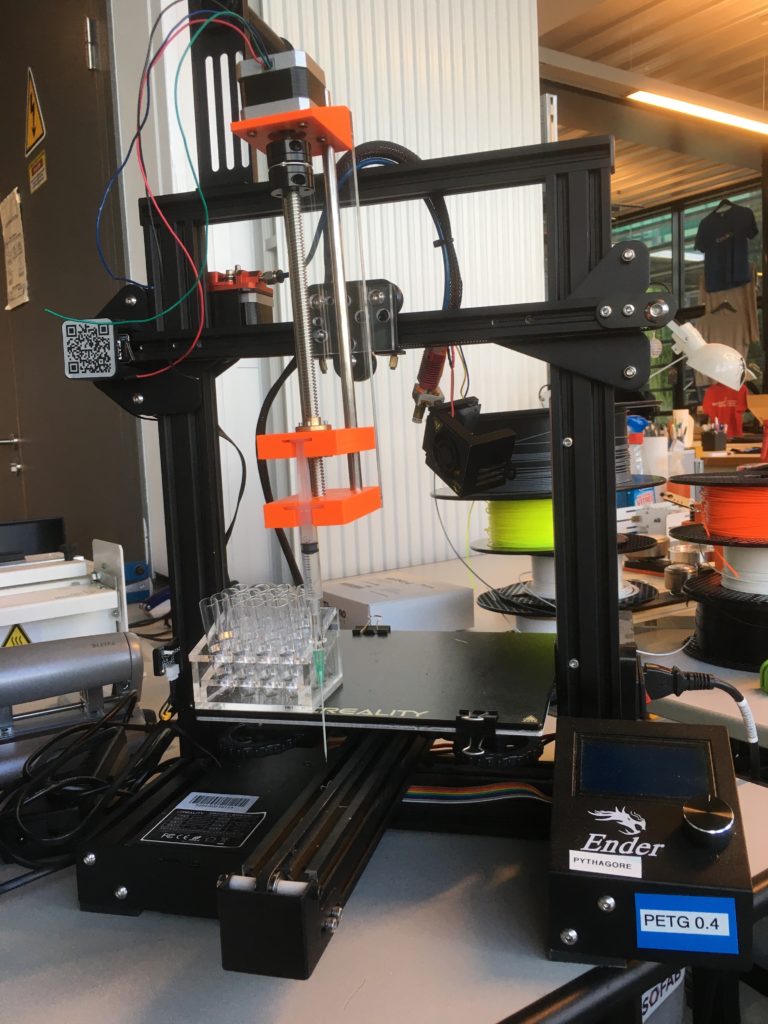
Puis je pus enfin tester mes lignes de Gcode avec le pousse-seringue monter sur la machine.
Bien que j’aie encore rencontré quelques difficultés ; notamment une vis trop longue qui empêchait mon pousse seringue de s’enfoncé complétement. Je suis arrivé à de bons résultats.
Je pus passer au test suivant avec le miel. Là encore, problème : le moteur de l’extrudeur à été réutiliser sur le pousse-seringue il fallut donc une rallonge qu’heureusement Xavier m’apporta dès le lendemain.
A présent je test divers combinaison de Gcode afin de déposer la bonne quantité de miel dans chaque tube.
Finalité de mon projet
Une fois que j’aurais parfaitement maitrisé ma machine et y aurais ajouter quelques améliorations. Il est prévu de publier son schéma de construction afin qu’elle soit reproduite par d’autre unité INRAE ou d’autres centre de recherche qui en auraient l’utilité.
Cela permettra de diminuer le temps de travail des techniciens sur cette activité leurs permettant de se consacrer à une autre tâche.